案例&資訊
靈動微MCU MM32 電機驅動軟件設計
來源: 日期:2019-11-12 10:05:00
在越來越注重提倡環保節能的要求下, 新一代的產品都需要具備有高效的性能, 無論在各種行業方面亦是如此, 電子組件及驅動的算法也必須盡可能的高效。盡力達到市場所需.而作為國內本土領先的靈動微MCU供應商,則提出了以MM32 SPIN0x 32位微處理器開發的無位置傳感器FOC弦波驅動風機解決方案.以及對MM32 MCU電機驅動的軟件設計的知識.
MM32 MCU電機驅動的軟件設計
下列圖一為MM32 MCU電機磁場導向驅動軟件設計框圖,軟件流程一開始是由ADC讀取外部輸入電壓產生目標速度命令, 經過閉回路加速度斜率控制器運算后, 得到可提供速度PI控制器功能方塊的速度命令, 接著用此速度命令與反饋的實際速度, 經由PI 控制器計算之后產生力矩電流命令。
磁場導向控制器(FOC)功能方塊接收到此力矩電流命令及電機的估測角度后, 經過三相電流的反饋、坐標轉換、電流環PI計算、及空間矢量調制等法則運算, 由此獲得要逼近目標轉速所需求的三相PWM占空比數據, 之后將此數據產生PWM輸出給予外部的電力驅動組件, 以此驅動電機運轉。
在磁場導向控制器功能方塊產生PWM 訊號的過程中, 滑模估測器功能方塊負責產生電機運轉所需要的估測角度及速度。
圖1藍色標示的部分為磁場導向控制的細部軟件框圖, 這個理論是由 F. Blaschke 在1972年所提出的。各個方塊輸出/輸入的斜體文字為實際程序中的變量名稱。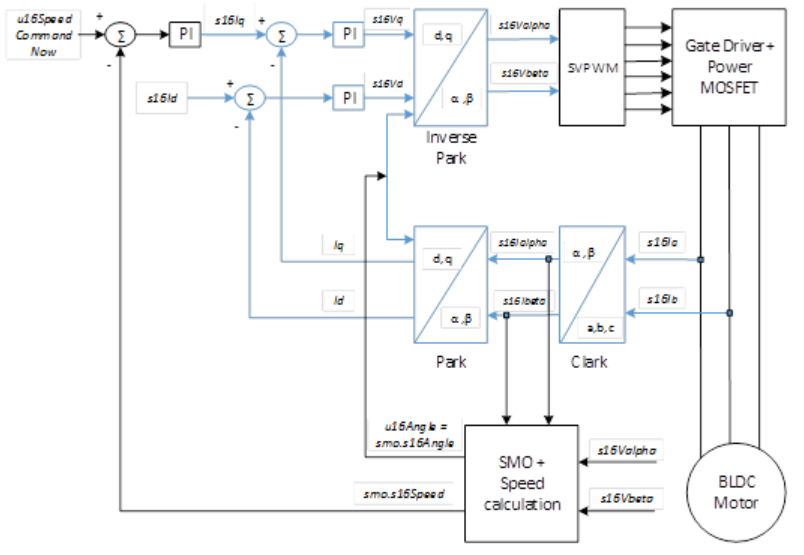
本方案的磁場導向控制主要有三個坐標轉換計算, Clarke轉換、Park轉換及逆變換Park轉換, 目的是要能夠控制電機的磁場電流 Id及力矩電流Iq, 以實現電機的轉速控制。
靈動微MCU選型鏈接:http://www.tglc8.com/list-75-1.html
關鍵詞:靈動微MCU
MM32 MCU電機驅動的軟件設計
下列圖一為MM32 MCU電機磁場導向驅動軟件設計框圖,軟件流程一開始是由ADC讀取外部輸入電壓產生目標速度命令, 經過閉回路加速度斜率控制器運算后, 得到可提供速度PI控制器功能方塊的速度命令, 接著用此速度命令與反饋的實際速度, 經由PI 控制器計算之后產生力矩電流命令。
磁場導向控制器(FOC)功能方塊接收到此力矩電流命令及電機的估測角度后, 經過三相電流的反饋、坐標轉換、電流環PI計算、及空間矢量調制等法則運算, 由此獲得要逼近目標轉速所需求的三相PWM占空比數據, 之后將此數據產生PWM輸出給予外部的電力驅動組件, 以此驅動電機運轉。
在磁場導向控制器功能方塊產生PWM 訊號的過程中, 滑模估測器功能方塊負責產生電機運轉所需要的估測角度及速度。
圖1藍色標示的部分為磁場導向控制的細部軟件框圖, 這個理論是由 F. Blaschke 在1972年所提出的。各個方塊輸出/輸入的斜體文字為實際程序中的變量名稱。
圖1. 磁場導向軟件設計框圖
本方案的磁場導向控制主要有三個坐標轉換計算, Clarke轉換、Park轉換及逆變換Park轉換, 目的是要能夠控制電機的磁場電流 Id及力矩電流Iq, 以實現電機的轉速控制。
靈動微MCU選型鏈接:http://www.tglc8.com/list-75-1.html
關鍵詞:靈動微MCU





